Creating the digital twin of the Daytona Kart Track.
The first track I created in Optimum Lap was the Daytona Kart track layout as raced on August 3rd, 2024. My Second Autocross. I decided to use this course as it is my local course and where I am going to do most of my racing (Having a toddler makes traveling for races difficult).
The first thing I need to say is that making the track incredibly accurate and making sure laptimes correlate to the thousandth of a second is not the goal here. The objective is to get a track that will provide similar behavior to the cars on the course and where the sensibility of the car to different changes and mods can be evaluated. We can also evaluate some of the techniques the optimum driver uses and find potential areas where time can be gained.
The approach I chose was simple: I took a snapshot of the track on Google Maps' satellite view with the highest zoom I could. I also made sure that the scale was visible in the screenshot. I then imported the course into Autodesk Fusion. Fusion is a very robust CAD package for this work, but I happened to have it handy, and best of all, it was free. Autodesk offers a free version of Fusion for Makers and hobbyists. It is limited in most functionalities but it’s a great tool for an amateur racer.
The first thing I did was import the snapshot into a fusion sketch, and then I traced my best estimate of the racing line. There’s one caveat here, to import it into Optimum Lap, turn radii have to be constant, and all segments have to be tangent to each other. This makes it a little tricky to model the track and racing line, but in the end, it can be done. I modeled the track and then used the measure feature to find the length and radius of each segment, which is what Optimum lap needs to create a track.
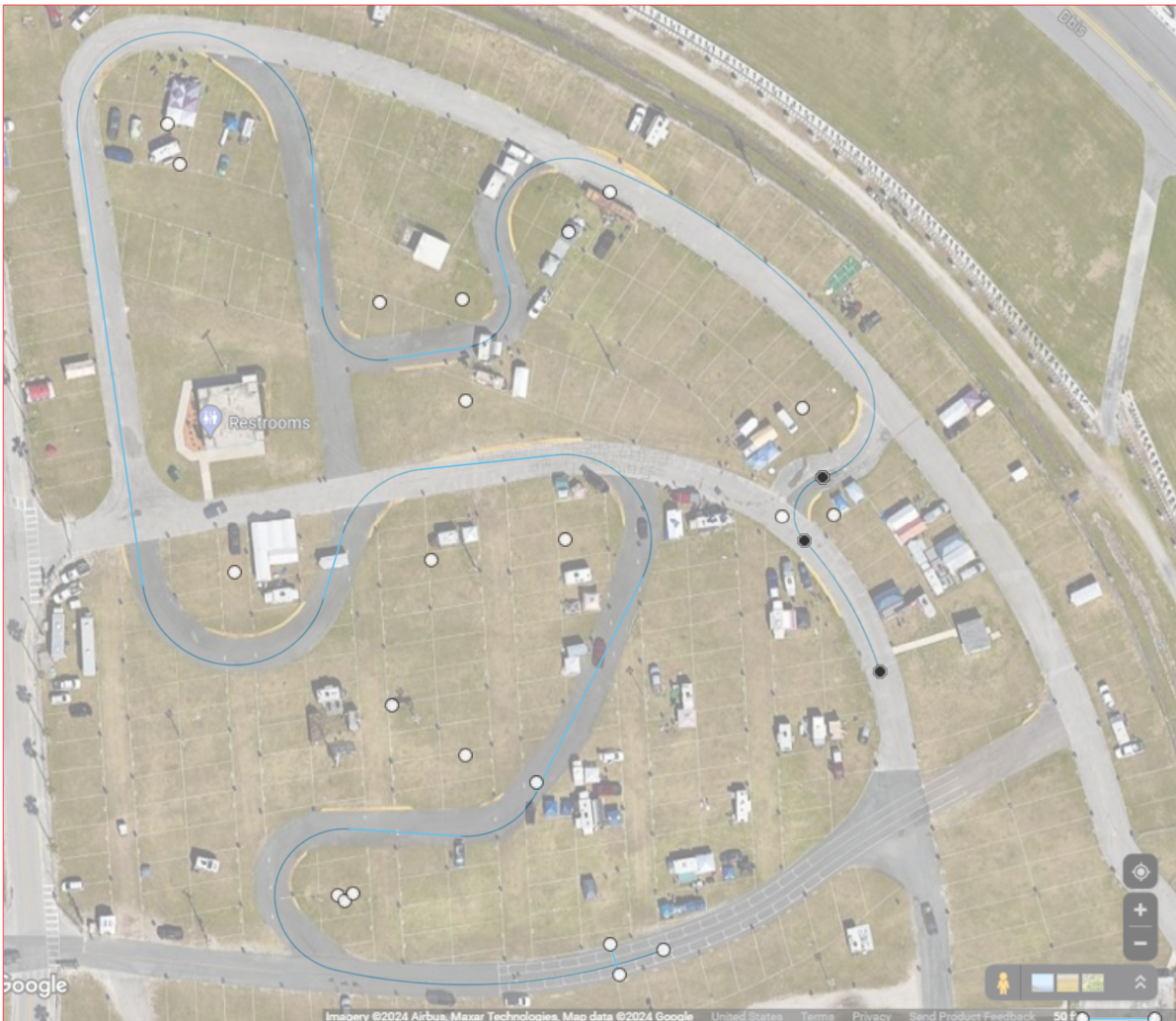
Track google maps, Autodesk Fusion
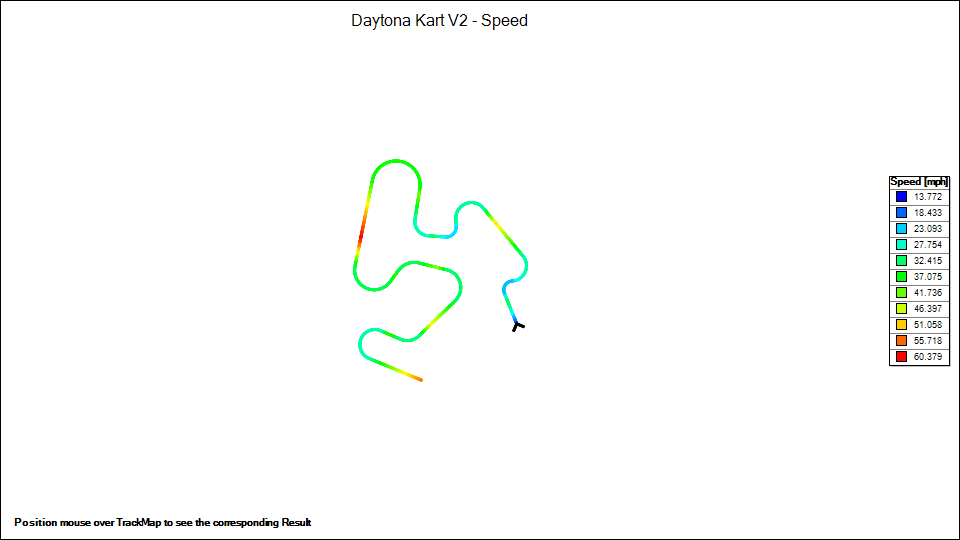
I then went to Optimum Lap and created the track:
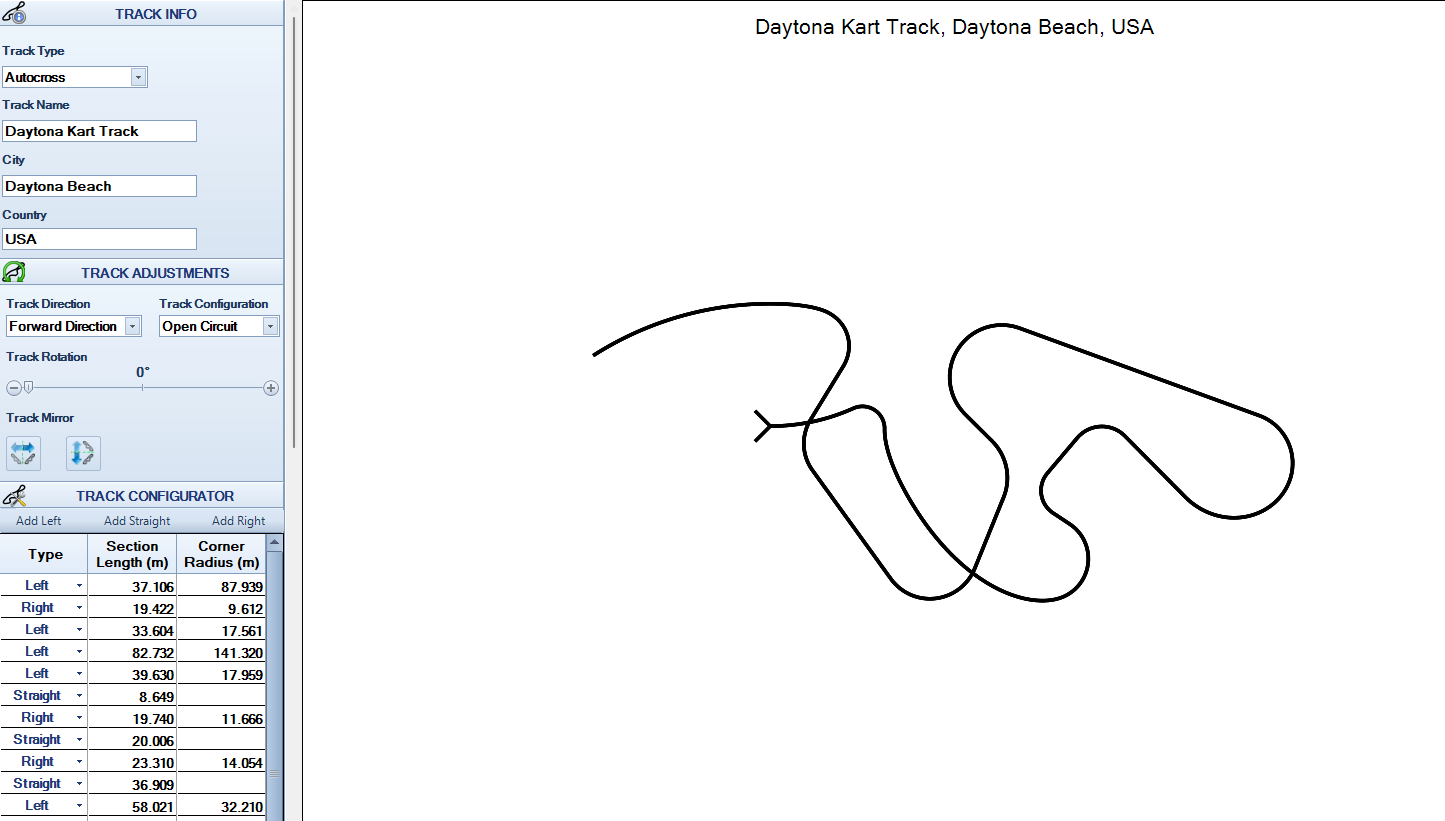
Immediately, I saw something was wrong! The course at Daytona is not a figure 8, and it looks nothing like one drawn. In reality, this is not that big of a problem. The problem is that to calculate the angle of the turns, the software relies on the radius and the circumference. In a course with so many sweeping and tight corners, the errors add up, and it will under or overestimate the angles of the turns. Even though these results are useful, I wanted to get it better. So, I simplified the track to make the sweeping corners straight assuming I cut them during the lap.
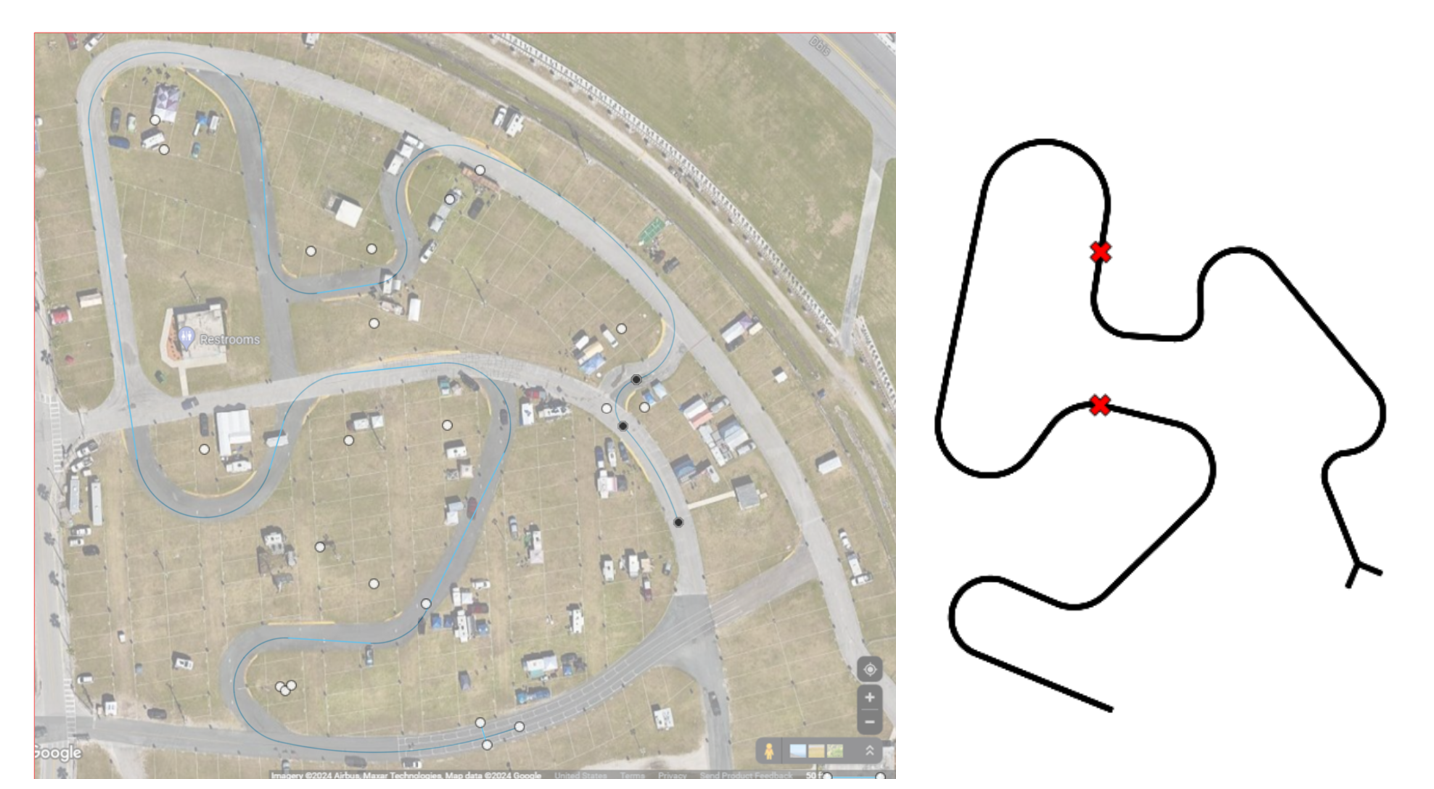
After simplification, the course looks a lot better, there is still a small error in the angles of the turns but still it looks better. The impact is small, the simulated lap time for a car in both courses is within half a second. Since we’re not trying to predict actual time on the course, but rather to use it as a baseline to see how car changes impact performance, we’re not too worried about this.
Once we have the track, we can check out the track stats:
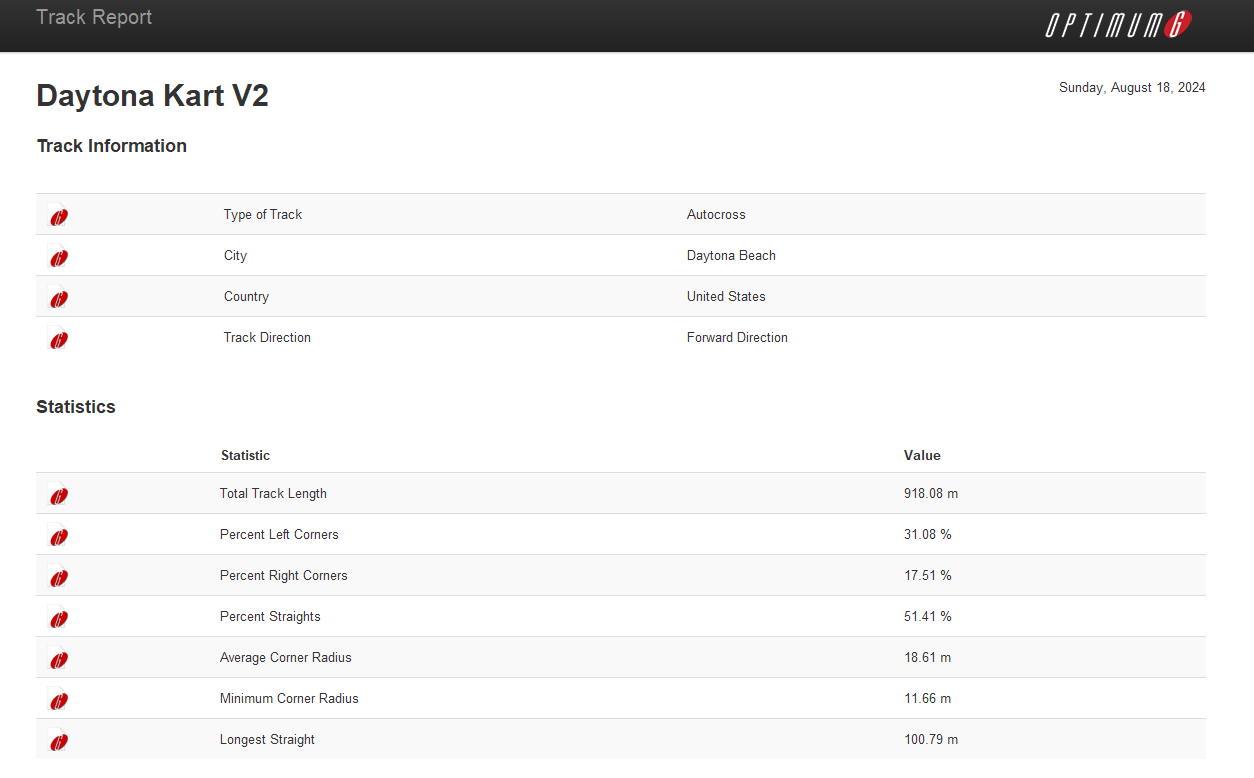
The track report can provide useful stats to consider while setting up the car. For instance, we have a left-turn bias when we run in this direction. Our tightest corner has a radius of 11.66m, which is very tight, and the average radius is 18.6m.
Having a digital twin of your course allows us to understand how changing car parameters will affect our performance on this track. In the next post, I will share how to set up the car, this will open the door to seeing what development actions we need to take.
Useful links:

Comments
Post a Comment